蚊媒传播疾病一直是全球公共卫生的重大威胁,每年可造成72.5万人死亡,占全球传染病负担的17%(Organization 2023)。为有效防控病虫害、遏制疫情传播,公园、社区等公共区域内的植被与绿地需定期开展杀虫剂喷洒杀作业。目前,洒杀主要依赖人工完成,存在操作强度大、对作业人员健康不友好、杀虫剂使用过量及作业效率低下等突出问题,而自主移动喷雾机器人作为创新解决方案,有望为户外喷洒作业带来变革。
在喷雾机器人系统中,如何精准感知环境及目标区域的几何结构与语义信息,是实现自主导航、任务规划与自适应喷洒控制的核心挑战。尤其在植被密集、地形复杂的户外环境里机器人想要“看清楚路、找准喷洒目标”却并非易事。如何让机器人精准感知环境几何结构与语义信息,实现自主导航与智能喷洒,成为行业亟待突破的技术壁垒。为此,广东省科学院智能制造研究所机器人技术团队提出了一种基于视觉-激光雷达融合的语义-几何联合建图框架,成功攻克复杂分割条件与传感器外参漂移导致的建图精度下降难题,为喷雾机器人装上了更 “聪明” 的 “眼睛” 和 “大脑”。该方法融合多尺度三维注意力机制与模糊边界增强模块,构建了多尺度模糊边界增强双注意力网络(MDANet),针对植物枝叶重叠、边界不清等特性显著提升图像分割精度。此外,团队设计了基于“种子生长”的语义信息扩散机制,用于在传感器外参存在漂移的情况下,实现更加稳健的图像与点云间的语义关联。实验结果表明,该方法在复杂植被分割任务中取得了90.17% 的平均像素精度(mPA),并可在高达40毫米的平移扰动和 0.18 弧度的旋转扰动条件下保持建图精度,展现出良好的鲁棒性与实用性,为自主喷雾机器人在园林、市政等场景下的应用提供了坚实支撑。
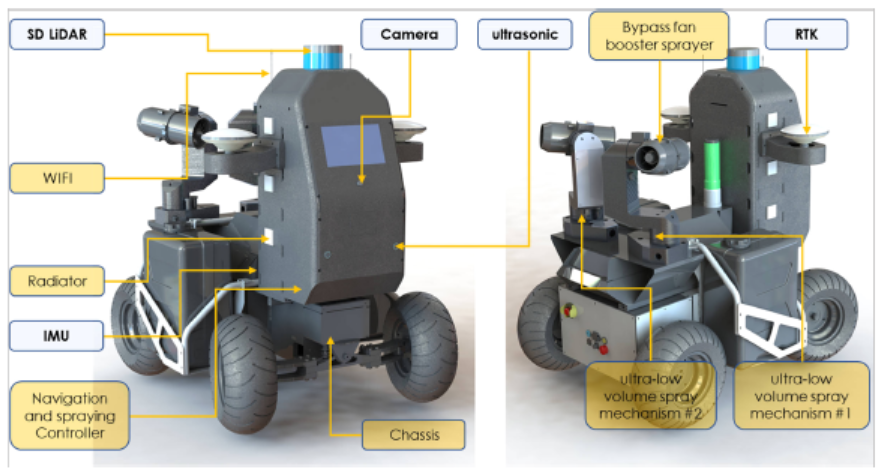
图1 自主研发的移动喷雾机器人

图2 文中所述方法构建的地图

图3 移动喷雾机器人室外喷洒现场图
相关研究成果发表于中科院二区期刊Journal of Field Robotics(计算机科学),广东省科学院智能制造研究所林旭滨博士为第一作者,有关工作得到粤港科技创新联合资助专项、中国博士后科学基金、广东省科学院打造综合产业技术创新中心行动等相关项目的资助。
论文信息:Xubin Lin, Zerong Su, Zhihan Zhu, Pengfei Yuan, Haifei Zhu, Xuefeng Zhou. Joint Semantic‐geometric Mapping of Unstructured Environment for Autonomous Mobile Robotic Sprayers, Journal of Field Robotics, 22553, 2025.
论文链接:https://doi.org/10.1002/rob.22553
供稿:省科学院智能制造所
撰稿:林旭滨 凌翔
审稿:黄丹 周雪峰 郭泽宜
校稿:徐超 肖捷 章震
 附件下载:
附件下载: